DTMF 无微控制器手机遥控机器人
在本项目中,我将向您展示如何设计一款可以通过手机控制的简单机器人车辆。该项目名为“无微控制器的 DTMF 控制机器人”。
1. 引言
DTMF 是双音多频(Dual Tone Modulation Frequency)的缩写。本文介绍了一种基于 DTMF 技术的机器人车辆。这里展示的电路无需使用微控制器即可操作机器人。该电路由简单的 DTMF 音频解码器集成电路和电机驱动集成电路组成。
当我们从手机按下按键时,会产生一个音调,这是两个频率的组合。在这两个频率中,一个是高频,另一个是低频。这种频率可以通过解码器集成电路解码为二进制序列。利用这个二进制序列来控制机器人。
2. DTMF 基础机器人车辆电路原理
DTMF 基础机器人车辆电路包括 DTMF 解码器集成电路、电机驱动集成电路(L293D 或 L298N)、电机以及一个简单的机器人底盘来承载所有这些组件。
使用的 DTMF 解码器集成电路是 HT9170B(实际上使用的是一个功能相同的变体 CM8870)。它有 18 个引脚。来自 DTMF 编码器的音频信号被送入 DTMF 解码器集成电路。解码器集成电路内部包含一个运算放大器,其输出被送入预滤波器以分离低频和高频。然后它被传递到代码检测电路,并将传入的音频信号解码为 4 位二进制数据。这些数据直接被送入驱动集成电路以驱动两个电机。这些电机根据解码后的输出进行旋转。
下图显示了按键上按下的按键对应的二进制解码输出。

如果从手机按下的是“8”键,则其解码输出为“1000”(按 Q1、Q2、Q3 和 Q4 的顺序)。因此,连接到前两个引脚(OUT1 和 OUT2)的电机将旋转,而第二个电机保持关闭状态。因此,机器人将向左或右方向移动。如果机器人需要向前或向后旋转,则二进制值应为“0101”或“1010”。这些值表示两个电机朝同一方向旋转,即向前或向后。上表给出了按键上每个按键按下的低频、高频和二进制输出值。
3. DTMF 控制机器人(无微控制器)电路图
3.1 电路元件
- DTMF 解码器集成电路(HT9170B 或 CM8870)
- 电机驱动集成电路(L293D 或 L298N)
- 电机
- 电阻——100KΩ × 2,330KΩ
- 电容——100nF × 2,22pF × 2
- 晶体——3.58MHz
- 机器人底盘
- 电池
注意
- 如前所述,这里使用的 DTMF 解码器集成电路是 CM8870。但电路图中标注的 DTMF 解码器集成电路是 HT9170B。由于引脚相同,因此不会有问题。但请参考数据手册。
- 同样,电路图中标注的电机驱动器是 L293D,但这里使用的电机驱动器是 L298N。请参考数据手册以获取引脚图。
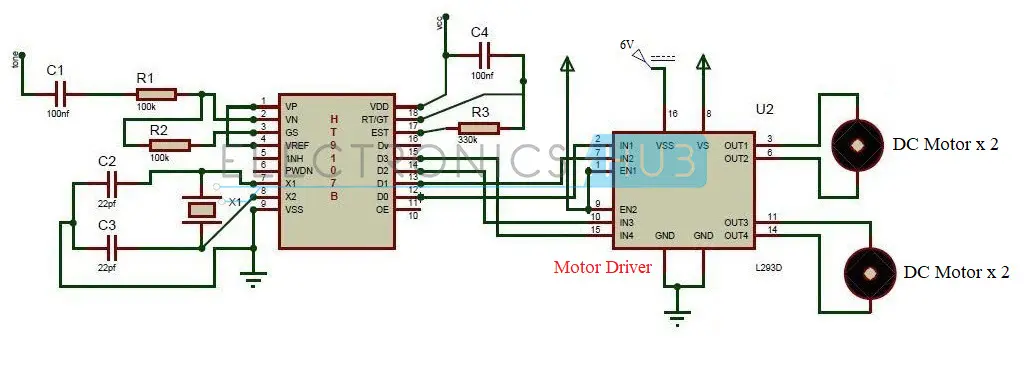
4. DTMF 控制机器人电路设计
电路的主要元件是 DTMF 解码器集成电路、电机驱动器集成电路和电机。这里使用的解码器集成电路是 CM8870 集成电路。解码器集成电路的第二个引脚是运算放大器的反相引脚。
音频信号通过一个串联的电容和电阻送入集成电路。运算放大器的输出通过集成电路的 GS 引脚反馈。一个外部晶体连接到集成电路的第 7 和第 8 引脚。
使用的电机驱动集成电路是 L298N。它有 15 个引脚。如果您使用的是模块,请将解码器集成电路的输出连接到 IN1、IN2、IN3 和 IN4。电机连接到 OUT1、OUT2、OUT3 和 OUT4。
5. 如何操作基于 DTMF 的机器人车辆?
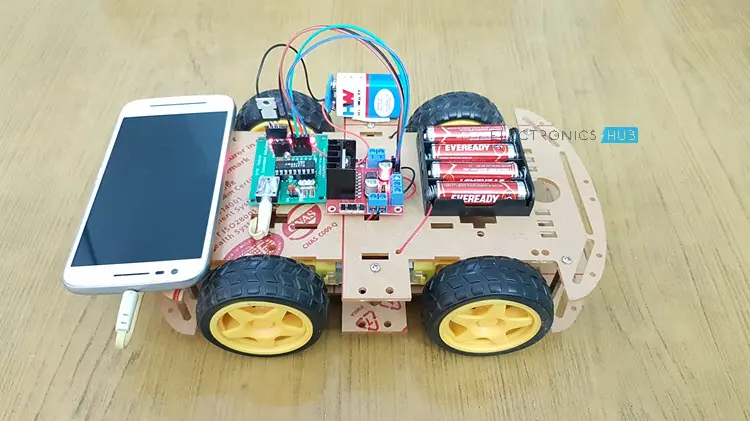
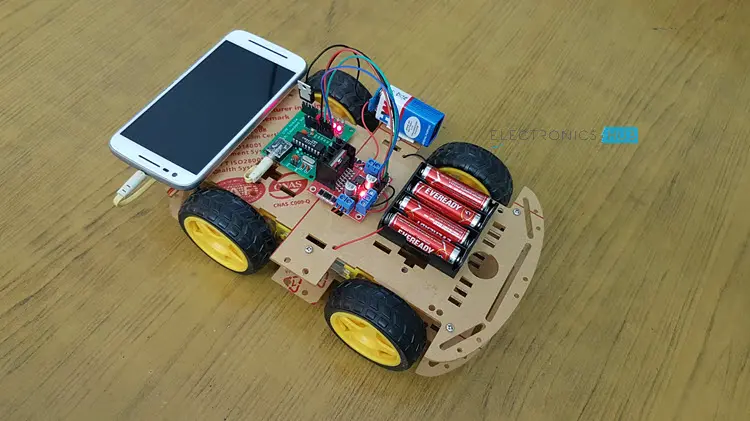
- 进行机器人机械组装,即连接电机到车轮,将电路放置在机器人上,并固定一部手机。
- 现在从您的手机按下“5”,机器人开始向前移动。
- 现在从您的手机按下“0”,机器人开始向后移动。
- 现在从您的手机按下“2”,机器人开始向左旋转。
- 现在从您的手机按下“8”,机器人开始向右旋转。
6. DTMF 控制机器人车辆电路应用
- 稍作修改后,DTMF 机器人可用于工业应用。
- 配备人体检测传感器的 DTMF 机器人可用于地震等灾难发生时检测建筑物下的人员。
- 配备摄像头的 DTMF 机器人可用于监控系统。
7. DTMF 控制机器人车辆的局限性
- 如果在无信号的情况下用另一部手机操作,DTMF 机器人可能无法正常工作。
- 只能使用具有特定插孔的手机。