自动铁路道口控制器
自动铁路道口控制系统是一个简单却非常实用的项目,它可以在检测到火车到达或离开时,自动控制铁路道口的开启与关闭。
通常情况下,铁路道口的开启和关闭是由道口管理员手动完成的,相关信息则由附近车站发送,用于告知火车的到达或离开。然而,一些铁路道口是完全无人值守的,这导致在这些无人看守的平交道口上频繁发生铁路交通事故。
为了彻底避免人工干预,提高铁路交通的安全性,我们需要实现铁路道口控制的自动化。
在本文中,我们介绍了两种不同的自动铁路道口控制电路:
- 基于 8051 单片机
- 基于 AVR 单片机
1. 自动铁路道口控制器
1.1 工作原理
自动铁路道口控制器的工作原理基于红外传感器的功能。本项目使用反射式红外传感器。
在反射式红外传感器中,红外发射器和接收器并排放置。当传感器前方无障碍物时,红外发射器发出的红外光将未被检测到,因为没有任何光线落在红外接收器上。
如果在红外发射器和接收器前方有障碍物,红外光将从障碍物表面反射并照射到红外接收器上。
这种设置可以配置为检测像火车这样的物体,并通过微控制器的帮助切换电机等负载的开关。
1.2 电路 1:使用 8051 的自动铁路道口控制器
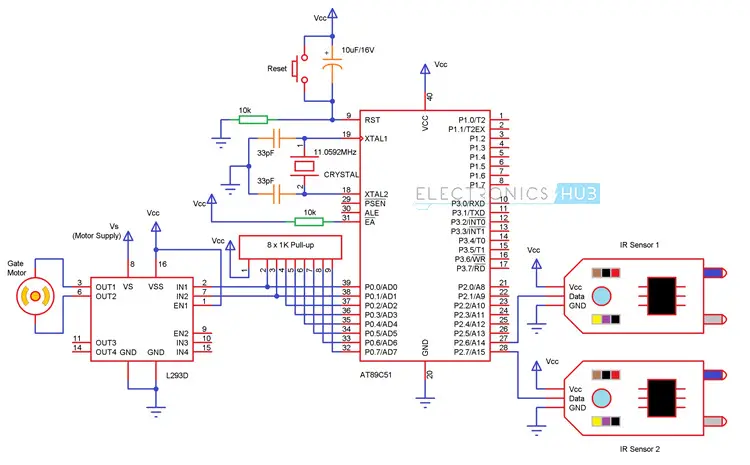
1.2.1 使用 8051 的自动铁路道口控制器电路图
1.2.2 项目元件
1.2.2.1 微控制器部分
- AT89C51 微控制器
- 11.0592 MHz 石英晶体
- 2 x 33pF 陶瓷电容
- 10µF / 16V 电解电容
- 10KΩ 电阻 x 2
- AT89C51 编程板
1.2.2.2 传感器和负载部分
- 2 x 反射式红外传感器
- 2 x 1KΩ 电阻
- L293D 电机驱动芯片
- 电机
1.2.3 元件描述
1.2.3.1 红外传感器
- 红外传感器用于检测火车的到达和离开。
- 红外传感器通常由两个部分组成:红外发射器和红外接收器。红外发射器��是一种发射红外光的设备。
- 同样,红外接收器是一种检测红外光的设备。光电二极管是最常用的红外接收器。
- 下图显示了本项目中使用的红外传感器电路。

1.2.3.2 L293D 电机驱动芯片
L293D 是本项目中用于控制道口电机的电机驱动芯片。L293D 电机驱动芯片是一种双 H 桥型电机驱动芯片,采用 16 引脚双列直插式封装。
借助此电机驱动芯片,我们可以同时控制两个电机,并且可以分别控制每个电机的正反转。
电机驱动器通常用于驱动高电流设备,如直流电机、步进电机、高强度灯等。它们作为简单的电流放大器,其输入为通常来自微控制器的低电流信号,输出为用于驱动负载的高电流信号。
1.2.4 电路设计
本项目的主要元件包括 8051 微控制器(AT89C51)、反射式红外传感器、L293D 电机驱动芯片和电机。
8051 微控制器的必要连接包括振荡器电路、复位开关和 EA 引脚。
可以使用高达 20MHz 的晶体振荡器作为外部时钟源。在本项目中,使用 11.0592 MHz 石英晶体振荡器。为了完成外部振荡器电路,使用两个 33pF 电容。最后,使用 10KΩ 电阻将 EA 引脚拉高。
现在,让我们看看实现项目所需的实际连接。首先,是 L293D 电机驱动。电机驱动的输入(IN1 和 IN2,即引脚 1 和 2)从微控制器的端口 0 获取。
但在连接它们之前,使用两个 1KΩ 电阻将端口 0 的引脚拉高。现在,将电机驱动的输入引脚(即 IN1 和 IN2)连接到端口 0 的前两个引脚(P0.0 和 P0.1)。
将电��机连接到电机驱动的 OUT 引脚。
最后,将两个红外传感器连接到微控制器:一个用于检测火车的到达,另一个用于检测火车的离开。
因此,将红外传感器的数据输出连接到微控制器的 P2.6 和 P2.7 引脚。

1.2.5 工作过程
本项目的工作过程非常简单,解释如下。
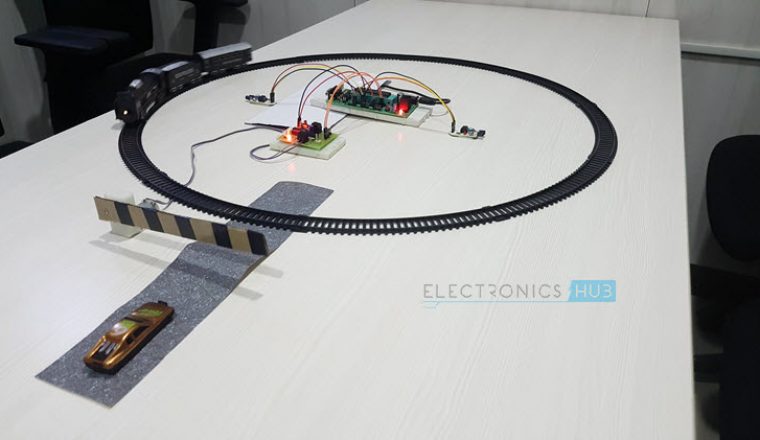
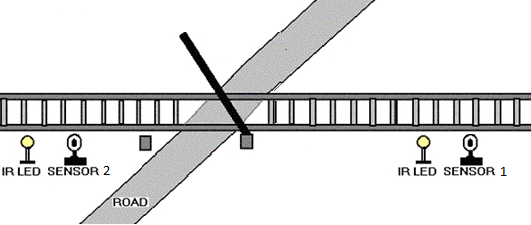
- 实际上,两个红外传感器分别放置在铁路道口的左侧和右侧。两个红外传感器之间的距离取决于火车的长度。通常,我们需要考虑该线路上最长的火车。
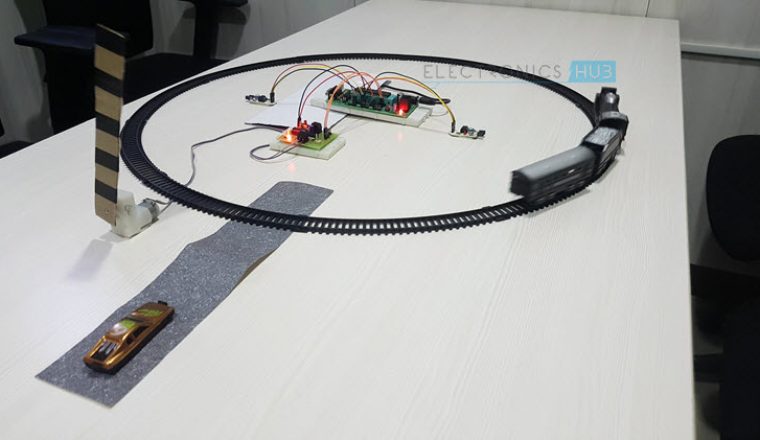
- 现在,让我们看看这个电路在实时中是如何工作的。在下图中,我们可以看到该项目的实时表示。
- 如果传感器 1 检测到火车的到达,微控制器将通过电机驱动器启动电机以关闭道口栏杆。
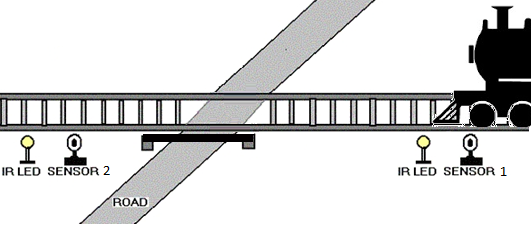
- 当火车通过道口时,道口栏杆保持关闭状态。
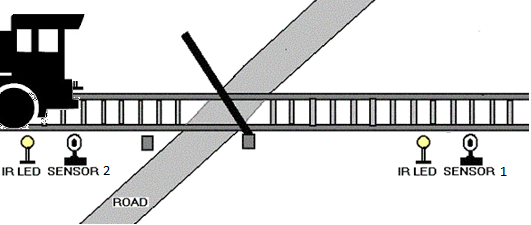
- 当火车通过道口并到达第二个传感器时,它将检测到火车,微控制器将打开道口栏杆。
1.2.6 优点与应用
- 自动铁路道口控制器的实现非常简单,硬件简单,控制容易。
- 借助该项目,可以完全消除道口的人工干预,从而预防许多铁路道口事故。
1.2.7 局限性
- 通过引入更高效的传感器网络,可以更高效地实现该系统。
- 可以使用手动无线控制与基于传感器的控制相结合的方式,以实现更好的操作。
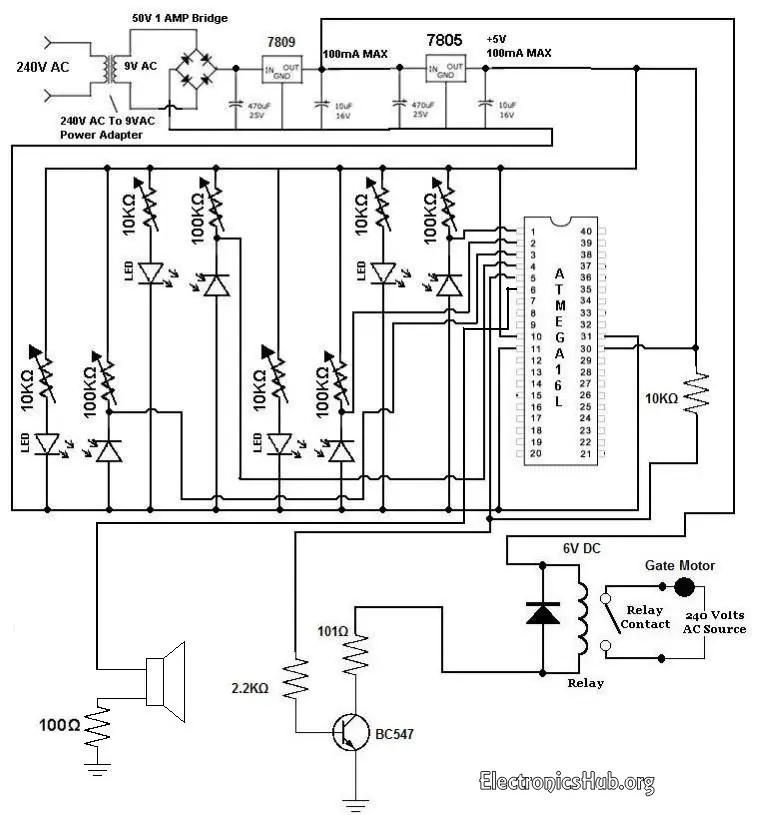
1.3 电路 2:带高速警报系统的自动铁路道口控制器
带高速警报系统的自动铁路道口控制器是一种创新电路,能够自动控制铁路道口栏杆的运行,通过检测火车在道口的到达和离开来实现。
在铁路轨道的远处安装有检测器,使我们能够了解火车的到达和离开。这些检测器将信号发送到微控制器,微控制器激活电机以相应地打开或关闭铁路道口栏杆。
该电路的另一个特点是其智能警报系统,能够检测即将到达的火车的速度。如果发现速度高于正常速度,则微控制器将自动激活道口栏杆处的警报。
这会提醒道路上铁路道口的乘客。此外,该电路还具有识别火车与其他入侵者(如动物等)的功能。该系统也可以在有人值守的道口实施,因为通过自动化可以消除人为错误。
2.3.1 使用 8051 的自动铁路道口控制器电路图
1.3.2 电路工作过程
该电路的工作过程可以清楚地解释如下。该电路基本上由四对红外 LED-光电二极管组成,分别安装在道口两侧,使红外 LED 和光电二极管分别位于轨道两侧,如下图所示。

最初,发射器持续发射红外光,使其落在接收器上。当火车到达时,它会切断落在接收器上的光线。假设火车从左向右到达,当火车切断第一对传感器时,激活一个计数器,当它通过第二对传感器时,计数器停止。这个计数值给出了时间周期,用于计算火车的速度。
将传感器 2 的输出发送到微控制器,微控制器激活继电器,从而关闭道口栏杆。现在,当火车的最后一节车厢切断第四对传感器时,微控制器将停用继电器,道口栏杆打开。
传感器如何知道最后一节车厢?
如前所述,使用计数值计算火车的速度,这意味着每节车厢的每个车轮都会在基于其速度的小段时间内切断传感器对。在最后一节车厢通过后,该小段时间内没有障碍物切断传感器对,因此它知道火车已经离开。
该电路的另一个特点是准确检测火车,即可能存在障碍物(例如动物)切断传感器的情况。在这种情况下,计数器将在一定时间内运行(此时间周期根据火车可能的最低速度设置)。如果障碍物在预设时间之前没有切断第二对传感器,则此障碍物不被视为火车,道口栏杆保持打开状态。
计算火车速度的另一个优点是,如果火车的速度超过限制,即超速行驶,则通过激活蜂鸣器提醒乘客。
该系统基本上由两对红外 LED-光电二极管组成,安装在铁路轨道上,相距约 1 米,每对的发射器和光电二极管分别位于轨道的两侧。安装方式如下图所示。系统显示火车从一对传感器到另一对传感器通过该距离所需的时间,分辨率为 0.01 秒,从而可以计算车辆的速度,如下所示:
速度(公里/小时)= 距离 / 时间
由于传感器之间的距离是已知且固定的,微控制器计时,根据这些信息,我们可以计算速度。
该电路的设计考虑了根据交通规则允许的火车最大速度。
微控制器用于处理传感器提供的输入,并生成相应的期望输出。