遥控间谍机器人电路
你是否曾尝试设计一款可以捕获周围音视频信息并能传输到远程的机器人?本文将向你讲解如何设计一款可通过遥控器控制的间谍机器人。最大控制距离为 125 米。遥控器具有四个开关,用于控制机器人向四个方向运动。
机器人通过 CCD 摄像头感知周围环境,并通过 射频 (RF) 无线通信将信息发送给接收端。我们之前在《家用电器 RF 遥控电路》中已经学习了如何建立 RF 通信。本电路同样采用了类似技术。
1. 遥控间谍机器人电路原理
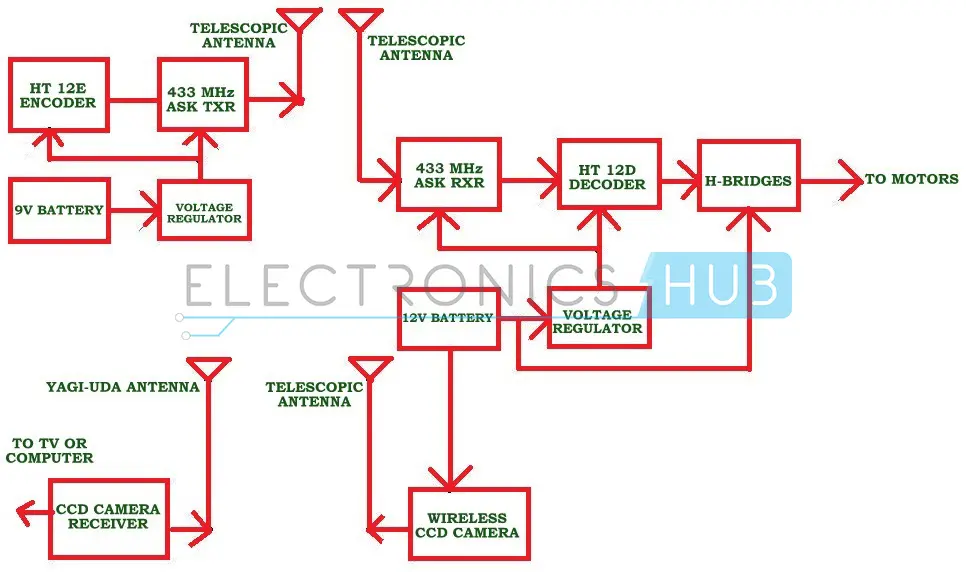
当按下遥控器上的任意按键时,HT12E 编码器生成 8 位地址和 4 位数据。然后 ASK(振幅键控)发射器将这 12 位数据发送到接收端。在遥控器部分,**DIP(双列直插开关)**用于设置 8 位地址。接收器接收到这 12 位数据后,将其传递给 HT12D 解码器进行解码。解码后的数据送入 L293D 电机驱动器以控制机器人电机旋转。
2. 遥控间谍机器人电路框图
3. 电路元件
-
HT12E 编码器
-
HT12D 解码器
-
RF 433 MHz 发射器与接收器
-
L293D 电机驱动器
-
无线 CCD 摄像头
-
按钮开关 – 4 个
-
直流电池 – 12V, 1.3 Ah
-
直流电池 – 9V
-
机器人
-
电阻 – 33kΩ, 750kΩ
-
单刀单掷开关 (SPST) – 1
-
反相器 (NOT 门) – 4
4. 遥控间谍机器人电路图与设计
遥控间谍机器人主要分为两个部分:
-
遥控部分:用于控制机器人
-
视频传输部分:用于传输音视频信息
4.1 遥控部分
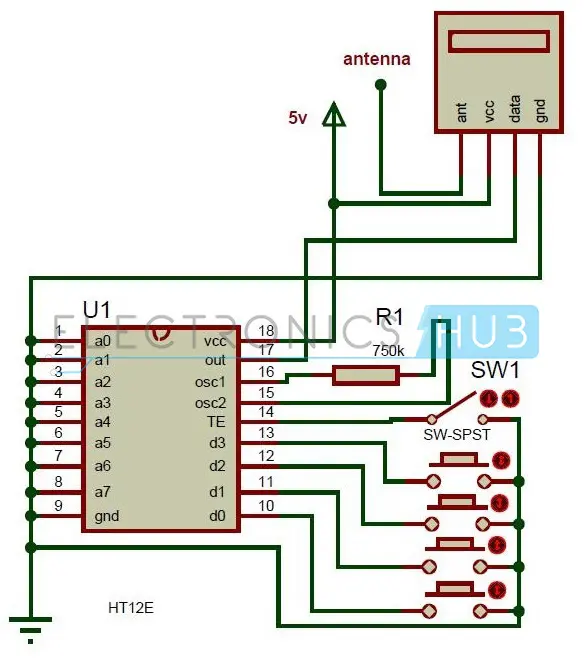
在遥控部分,HT12E 编码器读取开关的并行数据,并将其串行传输给 RF 发射器。
-
编码器工作电压:2.4V – 12V
-
RF 434 MHz 发射器输出功率最高为 8mW,频率为 433.92 MHz
-
ASK 发射器可接收线性或数字输入,工作电压为 1.2V – 12V DC
-
SW1 开关用于启用信号发送
4.2 视频传输部分
此部分主要元件为 无线摄像头、RF 接收器以及 机器人。
无线 CCD 摄像头
- 工作电压:12V DC
- 电源由电机电池供电
- 输出信号为音频和视频
- 该类摄像头在市场上较为常见
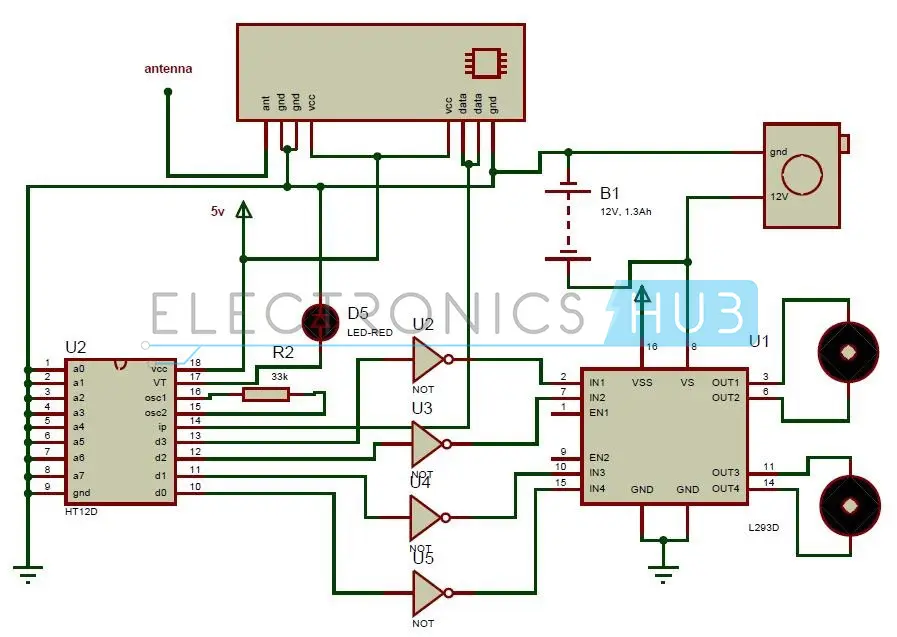
RF 接收器
- ASK 接收器接收发射器传来的串行数据,并将其交给解码器转换为并行数据
- 并行数据传递给 L293D 电机驱动 IC 控制机器人电机
- LED D5 指示数据有效传输
L293D 电机驱动器
- L293D 为双 H 桥电机驱动器
- 作为电流放大器,将低电流控制信号转换为高电流输出,驱动电机
- 可同时驱动两台电机,可实现前进与后退
- 电机 1 方向由 IN1 和 IN2 控制,电机 2 由 IN3 和 IN4 控制
- 电机驱动电压由引脚 8 提供
逻辑控制表如下:
| 电机1 | IN1 | IN2 | 状态 |
|---|---|---|---|
| Motor1 | 0 | 0 | 空闲 |
| Motor1 | 0 | 1 | 逆时针旋转 |
| Motor1 | 1 | 0 | 顺时针旋转 |
| Motor1 | 1 | 1 | 空闲 |
| 电机2 | IN3 | IN4 | 状态 |
|---|---|---|---|
| Motor2 | 0 | 0 | 空闲 |
| Motor2 | 0 | 1 | 逆时针旋转 |
| Motor2 | 1 | 0 | 顺时针旋转 |
| Motor2 | 1 | 1 | 空闲 |
-
Vcc:IC 内部操作电压
-
VSS:电机驱动电压(最大可达 36V, 600mA)
-
EN1 和 EN2 必须为高电平才能驱动电机
5. 如何操作遥控间谍机器人
-
按电路图连接各元件
-
将无线 CCD 摄像头安装到机器人上
-
将无线摄像头接收端连接到电脑或电视
-
打开机器人及遥控器电源
-
使用遥控器控制间谍机器人,同时在电脑或电视上观察周围环境
6. 遥控间谍机器人应用
-
用于观察人类无法到达区域的野生动物行为
-
军事应用,用于炸弹检测
-
工业应用
7. 遥控间谍机器人局限性
- 系统不适用于长距离操作
- 该电路为理论设计,实际应用可能需要做一定改动