基于8051的超声波测距仪
在本项目中,我们基于 8051 微控制器 和 超声波传感器 构建了一个超声波测距仪。我们有多种方法可以测量距离,其中一种方法是使用 超声波传感器或模块 进行距离测量。本文将向你解释如何使用 8051 微控制器 测量距离。该超声波测距系统可以测量 最长4米 的距离,精度可达 3毫米。
1. 超声波测距仪原理
一般来说,距离可以通过 脉冲回��波法 和 相位测量法 进行测量。这里采用的是 脉冲回波法。超声波模块向物体发射信号,然后接收从物体反射回来的回波信号,并产生一个输出信号,该输出信号的时间周期与物体的距离成正比。
超声波传感器的工作机制与 RADAR(无线电探测与测距) 类似。

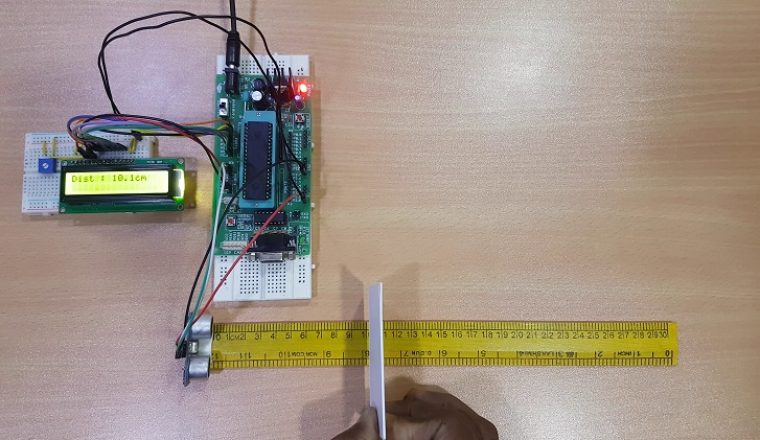
该电路根据 正常温度下声波的传播速度 计算物体的距离,并将距离显示在 LCD 液晶显示屏 上。
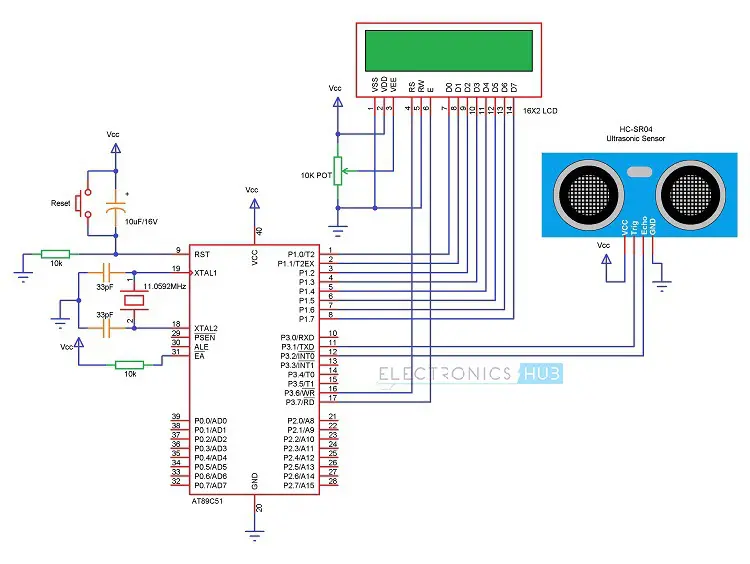
2. 电路原理图
基于8051的超声波测距仪电路图
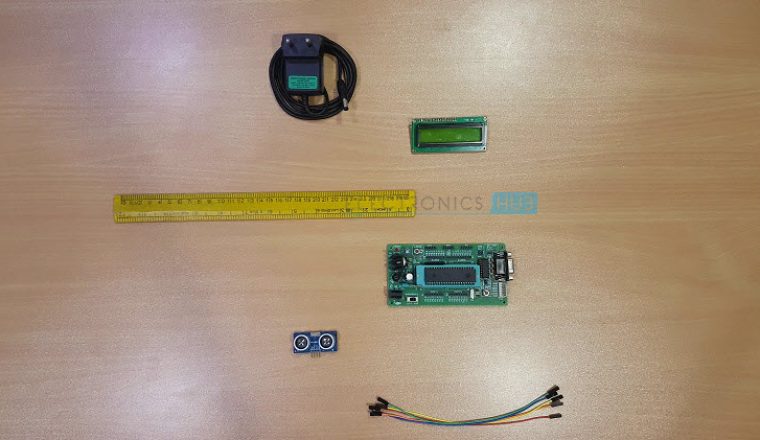
3. 超声波测距仪所需元件
- AT89C51 微控制器
- 8051 编程板
- 编程线缆
- HC-SR04 超声波模块
- 16x2 LCD 液晶显示屏
- 10KΩ 电位器
- 10µF / 16V 电解电容
- 2 x 10KΩ 电阻(1/4瓦)
- 0592 MHz 晶体振荡器
- 2 x 33pF 电容
- 按钮开关
- 连接导线
- 电源模块
- Keil µVision 软件
- Proteus 软件
- Willar 软件
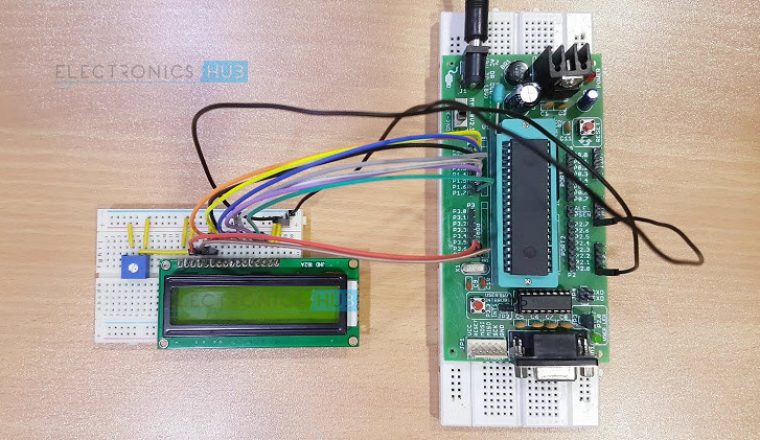
4. 电路设计
本项目的主要元件是 AT89C51 微控制器、超声波传感器 和 LCD 显示屏。
-
超声波传感器的 TRIGGER 引脚和 ECHO 引脚分别连接到 P3.1 和 P3.2 引脚。
-
LCD 的数据引脚连接到微控制器的 PORT1,控制引脚 RS、RW 和 EN 分别连接到 P3.6、GND 和 P3.7。
-
LCD 用于显示物体的距离。
-
使用 10KΩ 电位器 调节 LCD 的对比度。
-
微控制器、LCD 和超声波传感器的电源引脚均连接到 5V 直流电源。
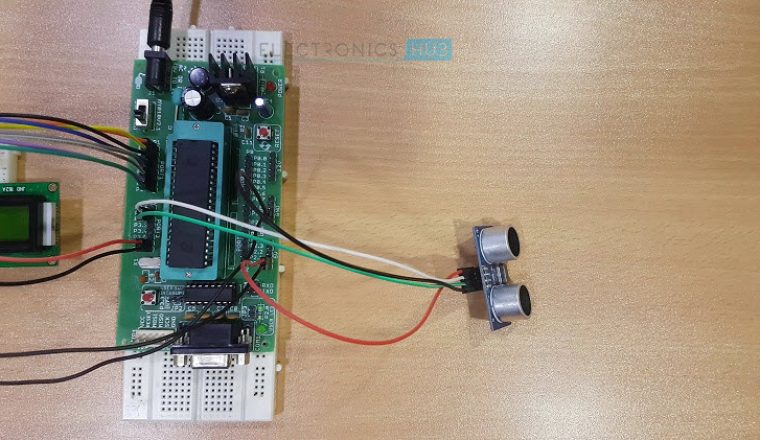
5. 超声波模块(超声波传感器)
HC-SR04 超声波模块
HC-SR04 超声波模块基于 声纳原理(SONAR) 工作,专为在小型嵌入式项目中测量物体距离而设计。它具有 高精度、高稳定性 的特点,并且测量不受 阳光 或 黑色物体 的影响。
主要特性
- 分辨率:3mm
- 测距范围:2cm ~ 400cm(4米)
- 测角:30°
- 触发输入脉宽:10µs
- 工作电流:15mA
- 工作频率:40KHz
引脚定义
-
Vcc:连接到 +5V DC
-
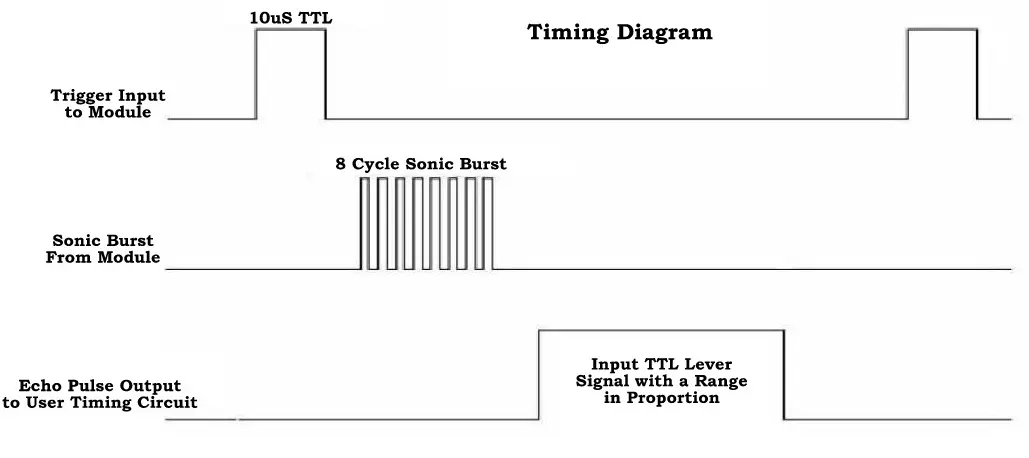
Trigg:触发信号输入引脚,需要 10µs 的高电平信号,接收有效触发信号后,模块会发出 8个40KHz脉冲
-
Echo:输出引脚,输出信号的周期与测量距离成正比
-
GND:接地引脚
6. 基于8051的超声波测距仪工作原理
当在 TRIG 引脚上施加 10µs 的高电平脉冲 时,超声波模块会发射 8个连续的40KHz脉冲。
- 发射完第8�个脉冲后,传感器的 ECHO 引脚会变为高电平
- 当模块接收到从物体反射回来的回波信号时,ECHO 引脚会变为低电平
- 通过计算信号发射与返回的总时间即可得到物体的距离
计算公式
物体距离(厘米):
物体距离(英寸):
其中,T 为信号往返时间(微秒)。
距离也可以通过声波传播速度 340m/s 计算.
7. 程序算法
-
在 TRIG 引脚上发送一个 10 微秒的高电平脉冲。
// 初始状态
P3.1 = 0;
// 设置 TRIG 引脚为高电平
P3.1 = 1;
// 延迟 10 微秒
delay_ms(10);
// 设置 TRIG 引脚为低电平
P3.1 = 0; -
等待超声波模块完成 40KHz 脉冲的发射。当第 8 个脉冲发射完成后,ECHO 引脚变为高电平,此时 TIMER0 开始计数。当 INT0 输入变为低电平时�,定时器停止计数。
// 等待 ECHO 引脚变高
while (INT0 == 0);
// 等待 ECHO 引脚变低
while (INT0 == 1); -
TIMER0 的值等于超声波信号发出并返回所需的总时间,因此只需取 一半时间。
-
超声波的传播速度等于声速,大约为:
-
根据速度和时间计算距离:
-
当系统时钟频率为 11.0592 MHz 时,TIMER0 每 1 微秒递增一次。因此可以得到:
-
或者,也可以直接通过经验公式计算目标距离:
8. 操作步骤
-
首先将程序烧录到微控制器中
-
按照电路图正确连接各元件
-
确保超声波模块的 Vcc 接到 5V DC
-
打开电源开关
-
将障碍物放在超声波模块前方,在 LCD 上即可观察到距离显示
-
关闭电源
9. 应用场景
-
用于测量障碍物距离
-
应用于汽车 倒车雷达 和 障碍物警示系统
-
用于地形监测机器人
10. 电路局限性
- 无法测量较远的距离