人体检测机器人
人体检测机器人并非新技术。根据应用场景,已设计出多种人体检测机器人。在地震等自然灾害期间,救援被困在建筑物下的人类非常困难。尽管救援团队可以进行检测,但耗时较长。在这种情况下,及时检测到人类至关重要。本文介绍了一种简单的人体检测机器人,该机器人通过射频(RF)技术手动操作。
1. 人体检测机器人电路原理
该电路的主要原理是使用人体检测传感器来检测人体。无线机器人通过个�人电脑(PC)手动操作。这里使用的无线技术是射频技术。数据通过射频技术传输到接收器。利用接收到的数据,机器人被操作和控制。
2. 人体检测机器人电路图
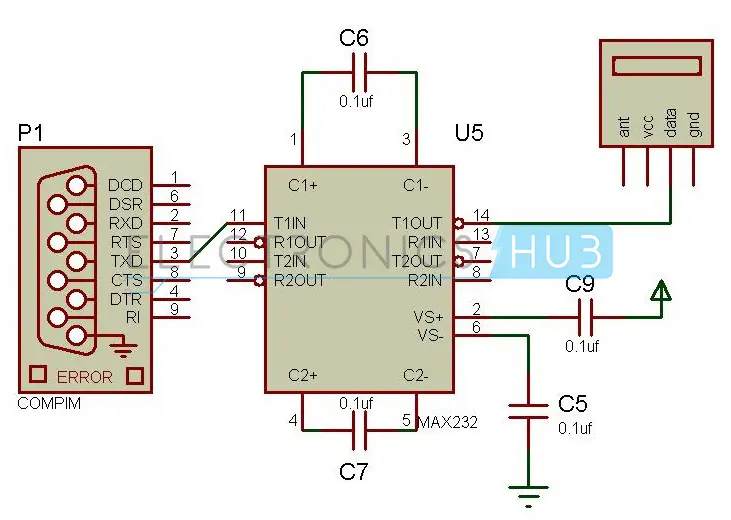
2.1 发射器电路
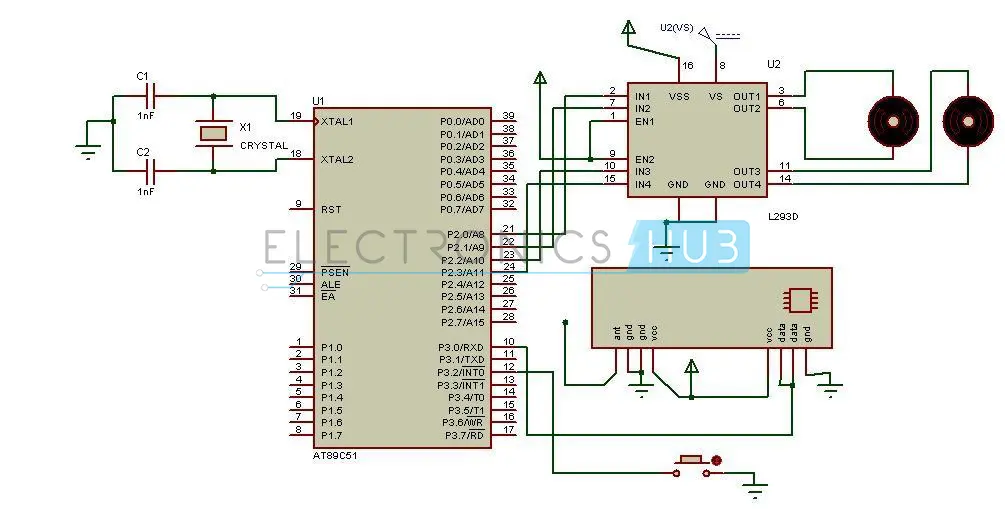
2.2 接收器电路
3. 电路元件
- AT89s51 微控制器
- PIR 传感器
- 射频发射器和接收器
- L293D 集成电路
- 个人电脑(PC)
- 机器人底盘
- Max232 集成电路
- 9V 电池
- 电机
4. �设计方法
电路可分为两部分:1)发射器部分,2)接收器部分。
4.1 发射器部分
发射器部分包括个人电脑(PC)、射频发射器、Max232 集成电路和 DB9 接头。操作机器人的指令通过个人电脑传输。PC 将数据传输到射频发射器,通过 Max232 实现。
Max232 用于转换逻辑电平。PC 的逻辑电平范围为 ±3V 至 ±15V,而射频模块的逻辑电平与 TTL 兼容。为了转换这些电压,使用了 Max232,它也被称为电平转换器。Max232 的 T1in 引脚连接到 DB9 的接收引脚,该引脚又连接到 PC。输出引脚连接到射频发射器。
射频是这里使用的无线技术,用于传输数据。可用模块中使用了多种载波频率,如 433.92 MHz、315 MHz、868 MHz、915 MHz 和 2400 MHz。此处使用的射频模块频率为 433 MHz。射频发射器的数据引脚连接到 Max232 的 T1out。射频发射器的 Vcc 引脚施加 5V 电压。
4.2 接收器部分
接收器部分包括 AT89c51 微控制器、L293D 电机驱动集成电路、射频接收器、机器人的电机和 PIR 传感器。
AT89c51 是 8051 系列微控制器。它是一个 8 位微控制器,具有 40 个引脚,拥有 4KB 的闪存。
射频接收模块连接到微控制器的 Port3。射频接收器的数据引脚连接到微控制器的接收引脚。两个 Vcc 引脚短接并连接到 5V 电源,GND 引脚短接�并接地。接收模块接收数据并将其传输到微控制器。
PIR 传感器在电路中起主要作用。它用于检测人类。PIR 传感器是一种被动红外传感器,其工作原理是:每个人都会发出低波长的红外辐射。因此,该传感器可以感应这些辐射并输出高电平逻辑值。该传感器可以在 20 英尺范围内检测人类。其工作电压为 2.2V 至 5V。PIR 传感器连接到微控制器的 Port1。
L293D 是一种电机驱动集成电路。该集成电路用于驱动电机,并消除产生的反向电动势(EMF)。该集成电路内部包含 H 桥电路。它有 16 个引脚,其中 4 个输入引脚用于驱动两个电机。使能引脚用于启用这些输入引脚。在第 16 引脚施加 5V 电压以操作集成电路,第 8 引脚施加 12V 电压以驱动电机。L293D 集成电路可以驱动高达 36V 的电压,即第 8 引脚可以施加 2.4V 至 36V 的电压。
5. 工作原理
- 首先将代码烧录到微控制器中。
- 安装机器人底盘。
- 按照电路图连接发射器和接收器电路。
- 将发射器安装到机器人上。
- 将接收器连接到个人电脑。
- 在个人电脑的超级终端中输入字符“F”,使机器人向前移动。
- 输入字符“B”使机器人向后移动。
- 输入“L”和“R”使机器人向左和向右移动。
- 当机器人移动时,如果 PIR 传感器检测到人类,机器人将停止移动,并打开蜂鸣器。
6. 应用场景
以下是人体检测机器人的主要��应用场景:
- 在自然灾害期间用于拯救人类生命。
- 可用于战场中检测人类。
- 可用于珠宝店、博物馆等场所的安全防护。
7. 电路的局限性
- PIR 传感器无法在其范围之外检测到人类。