10.4 实验原理
10.4.1 SHT-30模块介绍
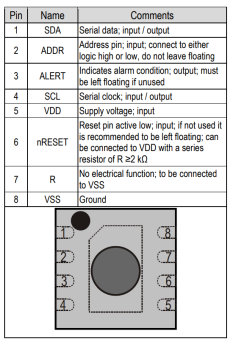
SHT-30是一款集成温度和湿度感测于一体的传感器芯片,采用2.5mm x 2.5mm贴片DFN封装,数字I2C总线接口,管脚功能描述如下:
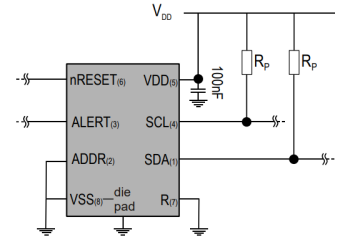
SHT-20芯片典型电路连接如下:
SHT-30芯片默认状态温度和湿度分辨率分别为0.01℃和0.01%RH。
10.4.2 SHT-30模块连接
STEP BaseBoard V4.0底板上的温湿度传感器SHT-30模块电路图如下(上拉电阻未显示):
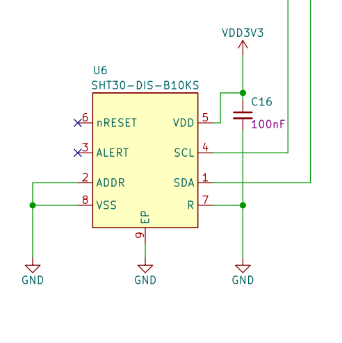
上图为温湿度传感器SHT-30模块电路,与FPGA硬件接口有I2C总线(SCL、SDA)。
10.4.3 SHT-30模块驱动设计
智能接近系统设计实验中我们已经讲述学习过I2C总线驱动的设计,本实验可以上原来的基础上调整,首先来了解SHT-30时序中的参数要点。
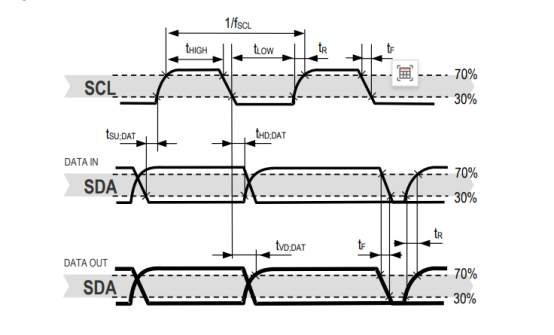
SHT-30时序图
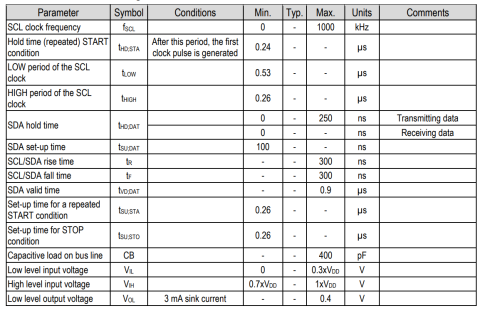
通过SHT-30时序参数了解,SHT-30支持I2C通信最大1MHz模式,
- 分频得到400KHz的时钟,程序实现同智能接近系统设计实验。
I2C时序基本单元(启动、停止、发送、接收、发应答、读应答)协议里统一的,所以所以基本单元状态的设计也是不需要调整的。
- 启动时序状态设计程序实现同智能接近系统设计实验。
- 发送单元和读应答单元合并,时序状态设计程序实现同智能接近系统设计实验。
- 接收单元和写应答单元合并,时序状态设计程序实现同智能接近系统设计实验。
- 停止时序状态设计程序实现同智能接近系统设计实验。
SHT-30驱动的流程,手册上看到SHT-30芯片有很多指令,指令列表可查看数据手册
本实验涉及软件复位、温度测量和湿度测量三个操作分别查看其时序流程。
软件复位:
软件复位操作时序流程如下:
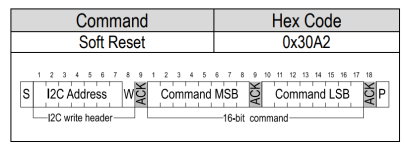
我们将这种操作设计成一个一个状态,程序实现如下:
MODE1:begin //16位寄存器写操作
if(cnt_mode1 >= 4'd5) cnt_mode1 <= 1'b0; //对START中的子状态执行控制cnt_start
else cnt_mode1 <= cnt_mode1 + 1'b1;
state_back <= MODE1;
case(cnt_mode1)
4'd0: begin state <= START; end //I2C通信时序中的START
4'd1: begin data_wr <= dev_addr<<1; state <= WRITE; end //设备地址
4'd2: begin data_wr <= reg_addr[15:8]; state <= WRITE; end //寄存器地址
4'd3: begin data_wr <= reg_addr[7:0]; state <= WRITE; end //寄存器地址
4'd4: begin state <= STOP; end //I2C通信时序中的STOP
4'd5: begin state <= MAIN; end //返回MAIN
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
温湿度测量:
温度测量分为两种模式:Single shot和period data acquisition,两种模式都可用但时序不同,本实验我们使用signle shot,其操作时序流程如下:
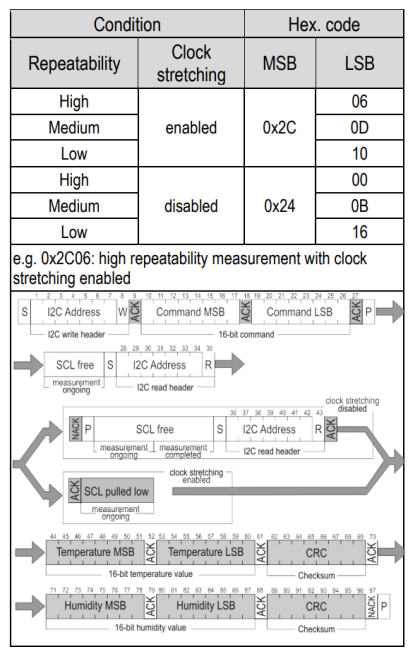
根据温湿度测量的时序流程,我们分为两部分,写指令部分和读数据部分,程序实现如下:
WRITE:begin //I2C通信时序中的写操作WRITE和相应判断操作ACK
if(cnt <= 3'd6) begin //共需要发送8bit的数据,这里控制循环的次数
if(cnt_write >= 3'd3)
begin cnt_write <= 1'b0; cnt <= cnt + 1'b1; end
else
begin cnt_write <= cnt_write + 1'b1; cnt <= cnt; end
end
else
begin
if(cnt_write >= 3'd7)
begin cnt_write <= 1'b0; cnt <= 1'b0; end //两个变量都恢复初值
else
begin cnt_write <= cnt_write + 1'b1; cnt <= cnt; end
end
case(cnt_write) //按照I2C的时序传输数据
3'd0: begin scl <= 1'b0; sda <= data_wr[7-cnt]; end //SCL拉低,并控制SDA输出对应的位
3'd1: begin scl <= 1'b1; end //SCL拉高,保持4.0us以上
3'd2: begin scl <= 1'b1; end //clk_400khz每个周期2.5us,需要两个周期
3'd3: begin scl <= 1'b0; end //SCL拉低,准备发送下1bit的数据
//获取从设备的响应信号并判断
3'd4: begin sda <= 1'bz; end //释放SDA线,准备接收从设备的响应信号
3'd5: begin scl <= 1'b1; end //SCL拉高,保持4.0us以上
3'd6: begin ack_flag <= i2c_sda; end //获取从设备的响应信号并判断
3'd7: begin scl <= 1'b0; if(ack_flag)state <= state; else state <= state_back; end //SCL拉低,如果不应答循环写
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
MODE2:begin //两次读操作
if(cnt_mode2 >= 4'd15) cnt_mode2 <= 4'd0; //对START中的子状态执行控制cnt_start
else cnt_mode2 <= cnt_mode2 + 1'b1;
state_back <= MODE2;
case(cnt_mode2)
4'd0: begin state <= START; end //I2C通信时序中的START
4'd1: begin data_wr <= (dev_addr<<1)|8'h01; state <= WRITE; end //设备地址
4'd2: begin ack <= ACK; state <= READ; end //读寄存器数据
4'd3: begin tmdata_h <= data_r; end
4'd4: begin ack <= ACK; state <= READ; end //读寄存器数据
4'd5: begin tmdata_l <= data_r; end
4'd6: begin ack <= ACK; state <= READ; end //读寄存器数据
4'd7: begin tmdata_crc <= data_r; end
4'd8: begin ack <= ACK; state <= READ; end //读寄存器数据
4'd9: begin hmdata_h <= data_r; end
4'd10:begin ack <= ACK; state <= READ; end //读寄存器数据
4'd11:begin hmdata_l <= data_r; end
4'd12:begin ack <= NACK; state <= READ; end //读寄存器数据
4'd13:begin hmdata_crc <= data_r; end
4'd14:begin state <= STOP; end //I2C通信时序中的STOP
4'd15:begin state <= MAIN; end //返回MAIN
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
最后我们编程控制状态机按照驱动例程代码中流程运行,程序实现如下:
MAIN:begin
if(cnt_main >= 4'd4) cnt_main <= 4'd2; //写完控制指令后循环读数据
else cnt_main <= cnt_main + 1'b1;
case(cnt_main)
4'd0: begin dev_addr <= 7'h44; reg_addr <= 16'h30a2; state <= MODE1; end //软件复位
4'd1: begin num_delay <= 24'd600; state <= DELAY; end //1.5ms延时
4'd2: begin dev_addr <= 7'h44; reg_addr <= 16'h2c06; state <= MODE1; end //写入配置
4'd3: begin num_delay <= 24'd6000; state <= DELAY; end //15ms延时
4'd4: begin dev_addr <= 7'h44; state <= MODE2; end //读取配置
default: state <= IDLE; //如果程序失控,进入IDLE自复位状态
endcase
end
10.4.4.系统总体实现
SHT-30驱动模块得到的是温度和湿度的编码值,想要得到℃和%RH的温度和湿度的数据还需要运算,运算后的数据是二进制数,想要显示在数码管上还需要BCD转码。先考虑运算:
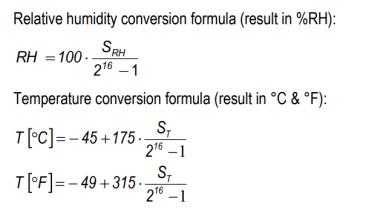
这里我们以温度的运算为例,如下:
T = -45 + 175 * T_code / 2^16
程序实现如下:
wire [31:0] a = T_code * 16'd17500;
wire [31:0] b = a >> 16; //除以2^16取商
wire [31:0] c = (b>=32'd4500)? (b - 32'd4500):(32'd4500 - b); //温度有正负,取绝对值
wire [15:0] T_data_bin = c[15:0];
上面程序中没有除以100的运算,没有集成专用除法器的FPGA实现除法运算非常麻烦,需要大量的逻辑资源且性能不佳,通常我们不在FPGA中直接做除法运算,上面程序中两个除法,⑴除以2^16可以通过右移16位方式解决 ⑵除以100在二进制数中不好解决,而在BCD码的十进制数据很好处理,相当于小数点左移两位(十进制位),所以等完成BCD码后再来处理。
BCD转码在前面电压器实验中介绍过,这里直接例化,程序实现如下:
//进行BCD转码处理
//小数点在BCD码基础上左移2位,完成除以100的操作
//T_data_bcd[19:16]百位,[15:12]十位,[11:8]个位,[7:0]两个小数位
wire [19:0] T_data_bcd;
bin_to_bcd u1
(
.rst_n (rst_n ), //系统复位,低有效
.bin_code (T_data_bin ), //需要进行BCD转码的二进制数据
.bcd_code (T_data_bcd ) //转码后的BCD码型数据输出
);
//要显示的数据,保留1位小数
//若温度为负,将T_data_bcd[19:16]百位数据用数字A替换,同时把数码管A的字库显示负号
assign T_data = (b>=32'd4500)? T_data_bcd[19:4]:{4'ha,T_data_bcd[15:4]};
//数据显示使能,高位消零
assign dat_en[7] = |T_data[15:12]; //自或
assign dat_en[6] = (b>=32'd4500)?(|T_data[15:8]):(|T_data[11:8]);
assign dat_en[5:4] = 2'b11;
//小数点显示使能
assign dot_en[7:4] = 4'b0010;
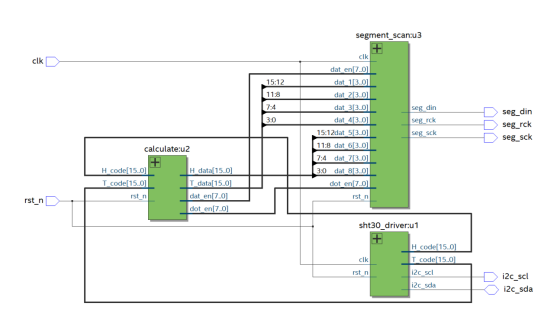
综合后的设计框图如下: