3.4 使用已有文件编程步骤
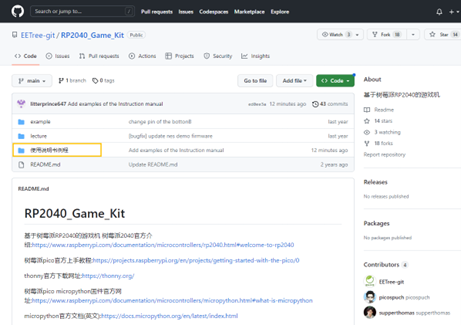
通过硬禾官方Github例程下载已有程序文件,驱动并读取姿态传感器数值变化。例程下载地址:https://github.com/EETree-git/RP2040_Game_Kit 官方github例程页面如下图所示。
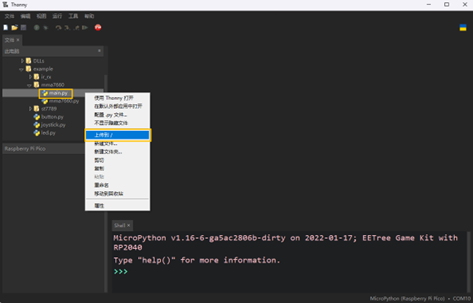
打开Thonny,在软件左上角“此电脑”文件栏中找到已下载文件的位置,如下图所示MMA7660文件夹里包含两个文件。
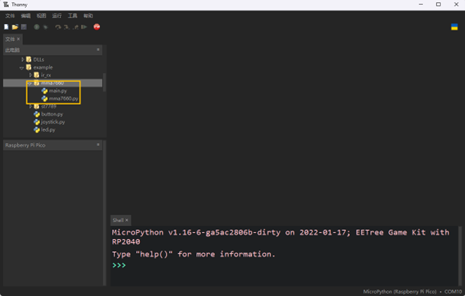
MMA7660文件夹里的文件分别使用鼠标选中右击后,在弹窗中点击“上传到/”,即可将电脑本地文件上传到芯片内部。
如图所示文件已经成功导入芯片内部,双击打开main.py。
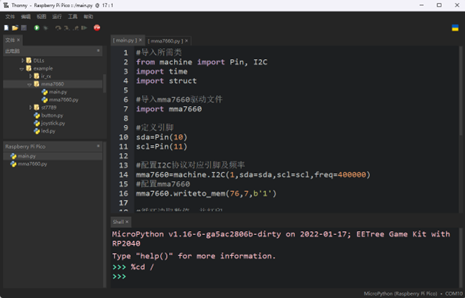
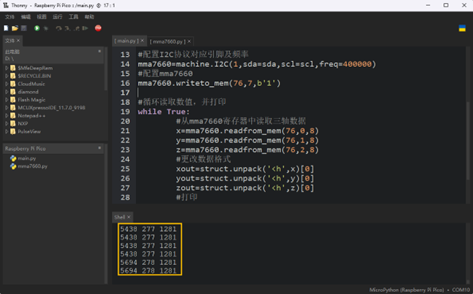
源码如下:
#导入所需类
from machine import Pin, I2C
import time
import struct
#导入mma7660驱动文件
import mma7660
#定义引脚
sda=Pin(10)
scl=Pin(11)
#配置I2C协议对应引脚及频率
mma7660=machine.I2C(1,sda=sda,scl=scl,freq=400000)
#配置mma7660
mma7660.writeto_mem(76,7,b'1')
#循环读取数值,并打印
while True:
#从mma7660寄存器中读取三轴数据
x=mma7660.readfrom_mem(76,0,8)
y=mma7660.readfrom_mem(76,1,8)
z=mma7660.readfrom_mem(76,2,8)
xout=struct.unpack('<h',x)[0]
yout=struct.unpack('<h',y)[0]
zout=struct.unpack('<h',z)[0]
print(xout,yout,zout)
点击运行,读取的某一时刻数值如图命令行所示。
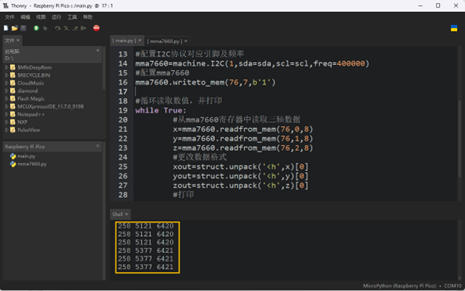
若转动RP2040 Game Kit时,打印的数值发生一定规律的变化则说明运动传感器模块正常工作。